Het Amerikaanse robotica-bedrijf Boston Dynamics kondigt een belangrijke update aan voor zijn humanoïde robot Atlas: een drie-vingerige grijper met zeven vrijheidsgraden en geïntegreerde tactiele sensoren. Deze stap markeert niet alleen een technische upgrade, maar ook een strategische keuze in de achtergrond van de robotica-ontwikkeling.
Een handvorm die niet menselijk is — maar wel efficiënt
In plaats van een klassieke vijfvingerige hand die het menselijk model volledig imiteert, kiest Boston Dynamics voor een eenvoudiger ontwerp: drie vingers inclusief duim-functie. Volgens de ingenieurs is dit “het minste aantal vingers dat toch zeer complexe manipulatietaken aankan”. De keuze is bewust: meer vingers betekenen meer complexiteit, hogere productiekosten en mogelijk hogere kans op storingen. Boston Dynamics zegt zo een balans te vinden tussen veelzijdigheid en betrouwbaarheid.
Boston Dynamics Details its 'Good Enough' Approach to Humanoid HandsIn a new video, Boston Dynamics engineers explain the design philosophy behind the electric Atlas's three-fingered grippers, emphasizing a pragmatic balance of dexterity, reliability, and simplified complexity for real-world manipulation. |
Techniek achter de grijper
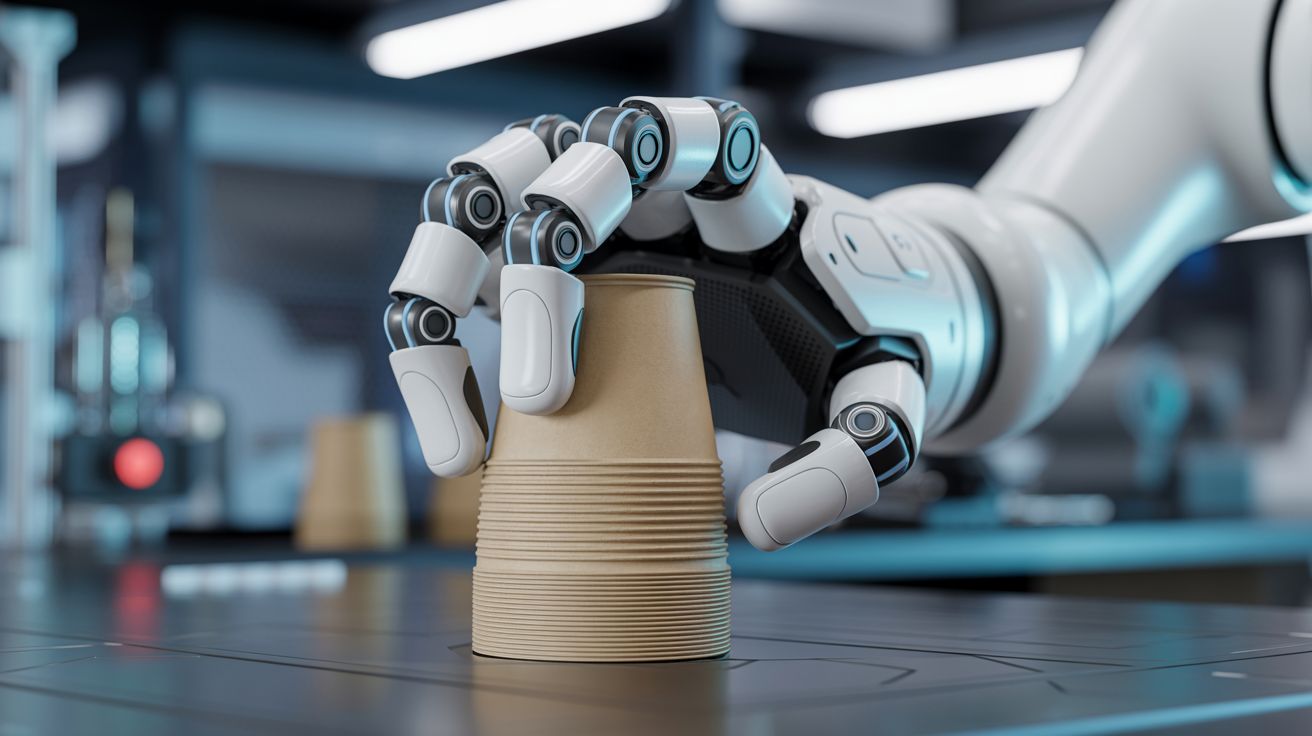
De nieuwe handmodule bevat zeven actuatoren — een opvallend aantal voor zo’n compacte grijper. De vingers zijn uitgevoerd met tactiele sensoren ingebouwd in een oppervlak met hoge wrijvingscoëfficiënt. Deze sensoren stellen Atlas in staat om subtiele objecten – bijvoorbeeld een stapel papieren bekertjes – op te pakken zonder ze te verpletteren. Daarnaast is de bewegingsvrijheid indrukwekkend: de vingers kunnen doorbuigen tot achter de handrug, wat ongebruikelijke greepstrategieën mogelijk maakt.
New from Boston Dynamics, a closer look at Electric Atlas's hand. | Brian HeaterNew from Boston Dynamics, a closer look at Electric Atlas's hand. |
Waarom dit relevant is voor industriële toepassingen
Voor traditionele robots was grijpen vaak beperkt tot eenvoudige grijpers of zuignappen. Met de nieuwe grijper van Atlas komt manipulatie dichter bij de veelzijdigheid die een mens heeft: variërend van een lichte pinch-greep tot een stabiele driesteklangbehendigheid. Deze ontwikkeling opent deuren naar toepassingen zoals magazijnwerk, assemblage, het hanteren van gereedschap of zelfs werkzaamheden in ongestructureerde omgevingen. Bovendien wordt de stap naar een algehele elektrische uitvoering gecombineerd met deze upgrade — een shift die manipulatie centraal stelt in plaats van enkel locomotie.
De strategische gedachte: Eenvoud boven perfectie
De keuze om niet voor een volledig menselijke hand te gaan, is opvallend — maar berust op een weloverwogen strategie. Boston Dynamics geeft toe dat hoewel vijfvingerige handen “menselijker” ogen, ze vaak overkill zijn voor veel industriële taken. Drie vingers bieden in hun visie het optimale compromis tussen complexiteit, kosten en prestaties. De boodschap is dus: een humanoïde hoeft niet alles perfect na te bootsen — het gaat erom wat praktisch en betrouwbaar is in een echte werkomgeving.
Wat komt hierna?
Hoewel deze nieuwe grijper al indruk maakt, is het pas het begin. Boston Dynamics richt zich op nóg grotere manipulatievaardigheden: denken aan het omgaan met een gereedschap, het selecteren van onderdelen in een bak (bin picking) of het uitvoeren van taken die verder gaan dan ‘pak en plaats’. De toekomstvisie: de juiste balans vinden tussen grijpkracht, gevoeligheid en snelheid. De vraag is niet alleen of robots zoals Atlas zich zullen begeven op de fabrieksvloer, maar wanneer en hoe snel.
Met zijn drie-vingerige grijper laat Atlas zien dat robotica niet per se drastische mens-imitatie hoeft te zijn om wél indrukwekkend te zijn. Door te focussen op efficiëntie, betrouwbaarheid en praktische bruikbaarheid, zet Boston Dynamics een stap in de richting van industriële humanoïden die daadwerkelijk inzetbaar zijn. De robothand is daarmee méér dan een innovatie-aanjager: het is een symbolische indicator dat de robotica-revolutie langzaam de planeet van productie en logistiek betreedt.