Een kijkje in de toekomst van multimodale robots
Onderzoekers aan het California Institute of Technology (Caltech) en het Technology Innovation Institute (TII) in Abu Dhabi hebben een opmerkelijk robotsysteem gepresenteerd: een mensachtig robotplatform dat vanaf zijn rug een autonome drone loslaat — en deze drone kan onderweg transformeren.
Wat zien we precies?
Het systeem bestaat uit twee hoofdcomponenten:
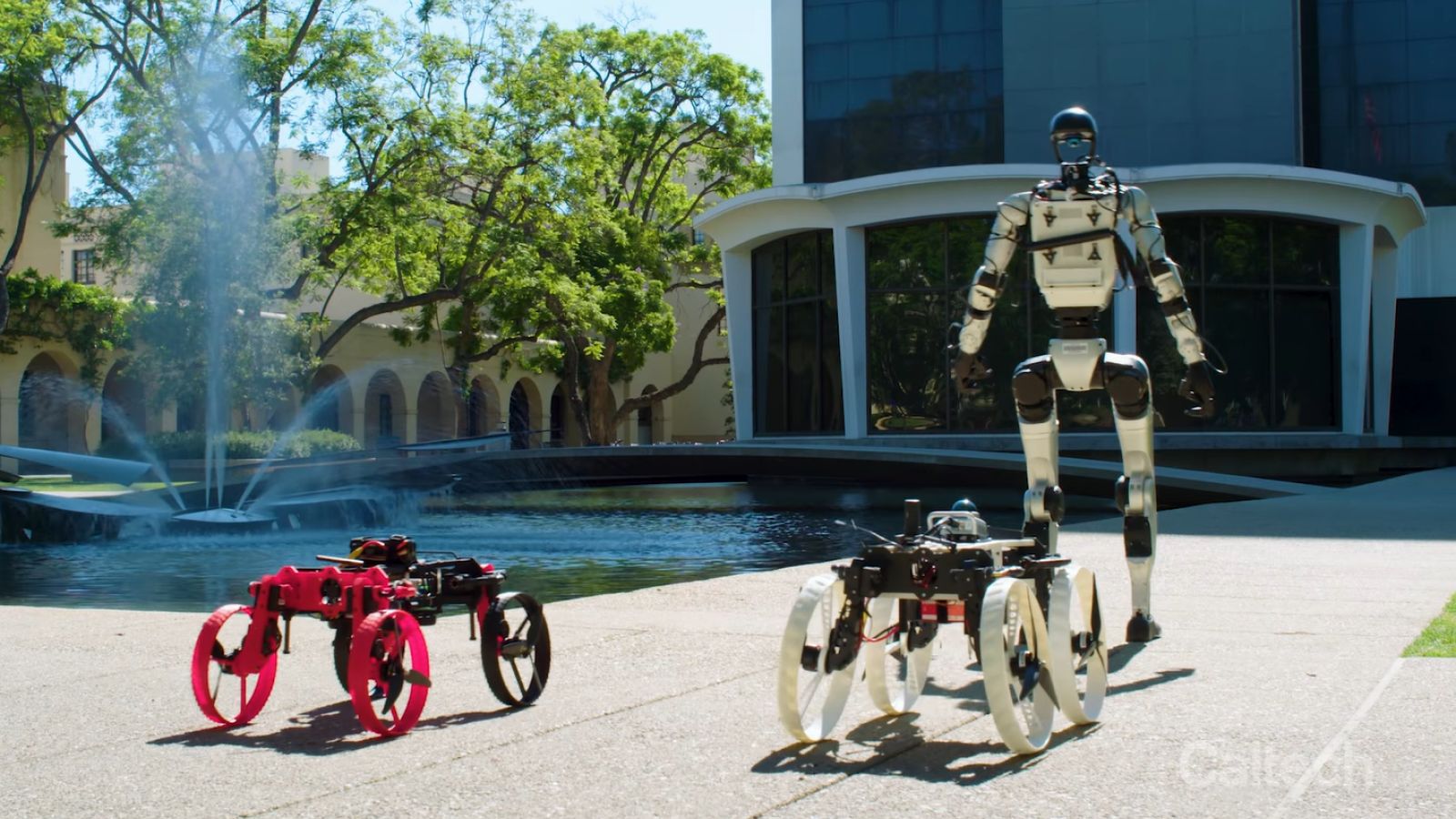
- Een humanoïde robot op basis van het platform Unitree G1, die kan lopen, trappen nemen en zich relatief vrij kan bewegen.
- Een drone-module genaamd M4, die op de rug van de robot is bevestigd en daarvandaan wordt gelanceerd. Deze is in staat om zijn bewegingstype ter plekke aan te passen: van rijden op vier wielen, tot vliegen met propellers, of ‘wandelen’ op twee wielen.
|
New 'Transformer' humanoid robot can launch a shapeshifting drone off its back — watch it in actionDeveloped at Caltech, a new robot is a humanoid that can launch an M4 drone, switching between different modes of motion, with wheels that can become rotors. |
Waarom is dit interessant?
Volgens professor Aaron Ames – die het CAST-lab (Center for Autonomous Systems and Technologies) aan Caltech leidt – is de uitdaging om verschillende locomotiemodaliteiten (lopen, rijden, vliegen) te combineren in één robotplatform. “Hoe nemen we die verschillende modi en brengen we ze samen in één pakket, zodat we de voordelen van al die modi hebben terwijl we de nadelen beperken?” aldus Ames.
In essentie opent dit systeem de mogelijkheid voor robots die zich flexibel aanpassen aan verschillende omgevingen: stedelijk terrein, trappen, open ruimtes, doorstartend via een drone – in plaats van robot één modus te geven en daar vast in te zitten.
Hoe werkt de drone precies?
De M4-drone is opmerkelijk veelzijdig:
- Hij kan vier wielen gebruiken en rijden over terrein.
- Diezelfde wielen kunnen opklappen tot propellers waarmee hij vliegt.
- Hij kan “staande” op twee wielen bewegen — een soort ‘wandelmodus’.
- Hij kan zelfs een rol maken of andere manoeuvres uitvoeren indien nodig. De robot (Unitree G1) buigt bij lancering naar voren en laat de drone los waarna de drone zelf zijn optimale route kiest via de meest geschikte bewegingsmodus.
Context en doelen van het onderzoek
Het gezamenlijke project tussen Caltech en TII duurde ongeveer drie jaar en heeft als doel betrouwbaardere autonome systemen te maken – machines die we kunnen vertrouwen, ook in veiligheidkritische situaties. Tijdens de presentatie merkte Ames op dat we robots steeds vaker om ons heen gaan zien: “Daarom moeten we werken aan veiligheid, betrouwbaarheid en controle.”
Het systeem toont aan dat we nog maar aan het begin staan van wat robots kunnen worden: niet langer enkel machines met één bewegingstype of toepassingsgebied, maar adaptieve platforms die – net als menselijke professionals – verschillend gedrag vertonen naargelang de situatie. Voor wie zich bezighoudt met de toekomst van werk, AI en automatisering, geeft dit tech-nieuws stof tot nadenken: welke rollen gaan mensen vervullen wanneer machines zich steeds veelzijdiger en autonoomer gedragen?