In de snel evoluerende wereld van kunstmatige intelligentie probeert het robot-bedrijf 1X iets te doen wat tot voor kort science-fiction leek: robots niet alleen laten bewegen, maar ze echt leren begrijpen hoe de wereld werkt. Met hun nieuwste technologische doorbraak — het 1X World Model — wil het bedrijf zijn humanoïde robot NEO in staat stellen nieuwe taken te leren door simpelweg te kijken naar video’s, net zoals mensen dat doen.

|
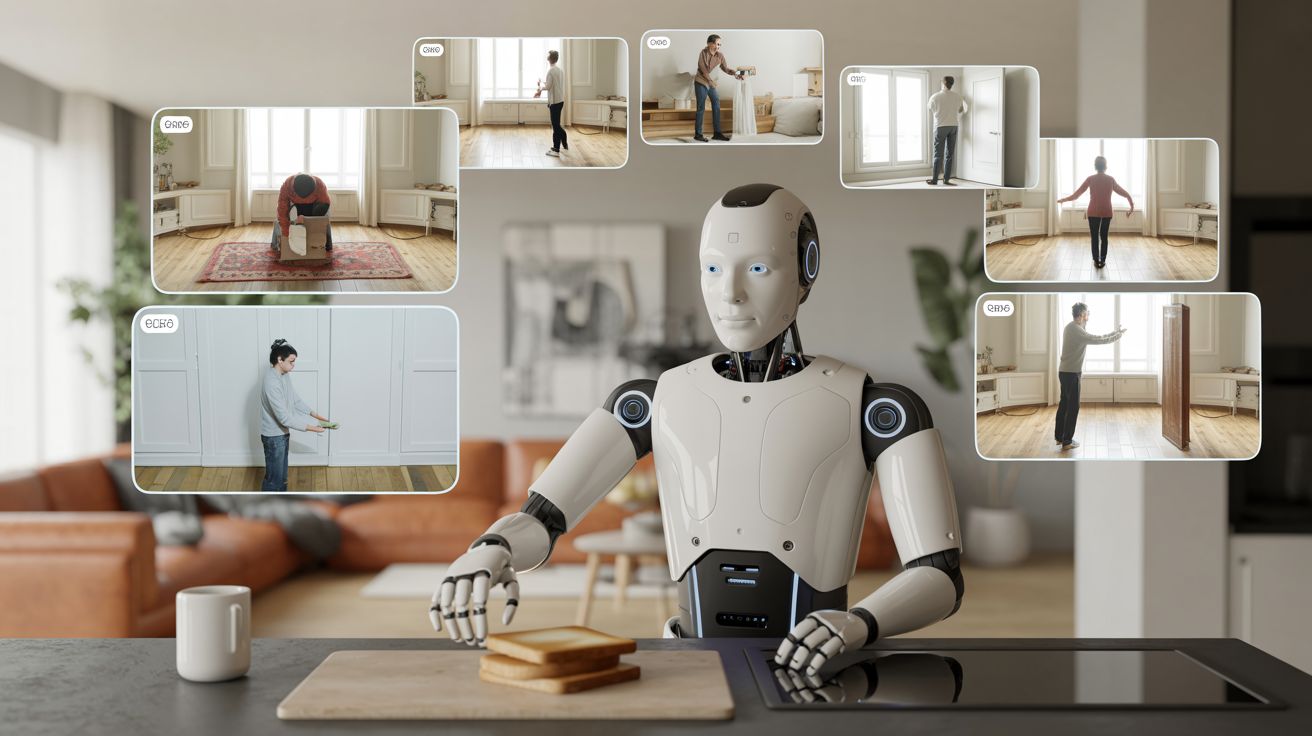
1X World Model | From Video to Action: A New Way Robots LearnHome robots need common sense behavior and a deep understanding of the physical world. |
Van alleen zien naar echt begrijpen
Tot nu toe moesten robots leren door enorme hoeveelheden handgemaakte data: duizenden uren waarin mensen hen precies voor deden wat ze moesten doen. Dat is tijdrovend, duur en beperkt de creativiteit van wat robots kunnen leren. Het 1X World Model verandert dit fundamenteel.
In plaats van louter te reageren op visuele input zoals een traditioneel visuele taal-actie (VLA) model, gebruikt het World Model web-schaal video’s om de dynamiek van de echte wereld te begrijpen en te voorspellen. Hierdoor kan NEO zichzelf trainen om onverwachte objecten, bewegingen en taken te leren zonder vooraf opgenomen robotdata of menselijke demonstraties.
Hoe werkt het precies?
Het 1X World Model is gebaseerd op een krachtig video-generatief model dat:
- Internetvideo’s omzet in een wereldsimulatie die visueel, ruimtelijk en fysiek geloofwaardig is.
- Deze gesimuleerde toekomstbeelden vertaalt naar echte robotbewegingen via een Inverse Dynamics Model, een systeem dat leert welke motorische acties horen bij de gegenereerde videoframes.
- Met een startframe en een tekstprompt kan het model een reeks toekomstige frames voorspellen — en daaruit de benodigde robotacties halen.
Dat betekent dat NEO niet alleen begrijpt wat er gebeurt, maar ook hoe hij moet handelen om het gewenste resultaat te bereiken.
Robots die zichzelf kunnen verbeteren
Een van de spannendste implicaties van deze technologie is dat NEO kan blijven leren zonder menselijke tussenkomst. Terwijl de wereldomvattende video-modellen verbeteren, profiteert NEO automatisch van betere voorspellingen en kan het zijn eigen dataset opbouwen door interactie met de fysieke wereld — een zelfversterkende leercyclus.
Dat breekt met de klassieke robotica-methoden waarin elk nieuw gedrag zorgvuldig moest worden ontworpen en voorgedaan door een mens.
Wat kan NEO al leren?
Hoewel de technologie nog in de beginfase zit, laat hij veelbelovende resultaten zien. De robot kan al eenvoudige huishoudelijke taken leren — het oppakken van objecten, het manipuleren van onbekende voorwerpen, en zelfs het uitvoeren van handelingen waarvoor hij niet expliciet getraind is.
NEO’s leervermogen blijft echter beperkt tot taken die fysiek en sensorisch dicht genoeg bij zijn bestaande vaardigheden liggen. Zoals 1X zelf opmerkt: je kunt NEO niet zomaar opdracht geven om een auto te besturen, maar je kunt hem wel leren toast te maken of een kleedje op te tillen.
Waarom dit een trendbreuk kan zijn
Deze ontwikkeling is niet alleen een upgrade voor huishoudrobots. Het weerspiegelt een belangrijke trend in de AI-wereld: het gebruik van wereldmodellen — systemen die leren door de dynamiek van hun omgeving na te bootsen — om AI-agents veel efficiënter en autonomer te laten leren.
World models staan op dit moment centraal in onderzoek naar toekomstige AI-systemen die kunnen plannen, anticiperen en zelfs zelf beslissingen nemen gebaseerd op interne simulaties van de echte wereld.
De toekomst van zelflerende robots
1X’s World Model markeert een stap richting robots die niet alleen taken uitvoeren, maar ook begrijpen waarom en hoe ze die uitvoeren. Dat opent de deur naar een toekomst waarin robots zich blijven ontwikkelen zonder enorme datasets van menselijke trainers — een klein stapje voor technologie, maar een grootse sprong voor robot-intelligentie.