NVIDIA zet een nieuwe stap in de race naar humanoïde robots. Tijdens GTC Taipei kondigde het bedrijf de NVIDIA Isaac GR00T Reference Humanoid Robot aan: een open referentieontwerp waarmee universiteiten, onderzoekscentra en robotontwikkelaars sneller kunnen experimenteren met mensachtige robots. Het gaat niet om zomaar een demonstratiemodel, maar om een complete onderzoeksbasis waarin lichaam, handen, sensoren, rekenkracht en software samenkomen.
Volgens NVIDIA moet deze aanpak de ontwikkeling van humanoïde robots democratiseren. Onderzoekers hoeven niet langer vanaf nul een eigen combinatie van hardware, simulatie, dataverzameling, training en implementatie te bouwen. De Isaac GR00T-referentierobot brengt die puzzelstukken samen in één open ontwikkelplatform.

|
NVIDIA Announces NVIDIA Isaac GR00T Reference Humanoid Robot for Academic ResearchNVIDIA today announced the NVIDIA Isaac™ GR00T Reference Humanoid Robot, the first open humanoid robot reference design built on NVIDIA Jetson Thor™ and the NVIDIA Isaac GR00T open development platform. |
Het lichaam: Unitree H2 Plus met tastende robothanden
Het fysieke hart van het systeem is een Unitree H2-humanoïde robot, bijna zes voet hoog en ongeveer 150 pond zwaar. De robot beschikt over 31 vrijheidsgraden in het lichaam, waardoor hij geschikt is voor tests op menselijke schaal. Daarbovenop komen twee Sharpa Wave vijfvingerige tactiele handen, bedoeld voor fijnere manipulatie en interactie met objecten. Samen komt het systeem uit op 75 vrijheidsgraden over lichaam en handen.
Die handen zijn belangrijk. De toekomst van humanoïde robots draait niet alleen om lopen, draaien of balanceren, maar vooral om grijpen, vasthouden, tillen, voelen en aanpassen. Een robot die in een magazijn, fabriek, labo of zorgomgeving nuttig wil zijn, moet meer kunnen dan bewegen. Hij moet de wereld letterlijk leren hanteren.
Het brein: Jetson Thor aan boord
Voor de rekenkracht gebruikt NVIDIA Jetson AGX Thor T5000, een onboard AI-computer met een NVIDIA Blackwell GPU, 128 GB unified memory en een configureerbaar stroomverbruik tussen 40 en 130 watt. Volgens NVIDIA levert het systeem 2.070 FP4-teraflops aan AI-prestaties, bedoeld voor realtime sensorverwerking, robotcontrole en inferentie op de robot zelf.
Dat is cruciaal voor wat NVIDIA “physical AI” noemt: kunstmatige intelligentie die niet alleen tekst, beeld of code verwerkt, maar ook in de fysieke wereld moet handelen. Een humanoïde robot moet tegelijk zien, luisteren, bewegen, reageren, plannen en veilig blijven functioneren. Daarvoor is lokale rekenkracht nodig, dicht bij de sensoren en motoren.
De softwarelaag: Van simulatie tot echte wereld
De Isaac GR00T-platformlaag omvat tools voor teleoperatie, simulatie, training, evaluatie en implementatie. NVIDIA noemt onder meer Isaac Teleop voor demonstratiedata, open Isaac GR00T-foundationmodellen, Isaac Sim en Isaac Labvoor simulatie en training, Isaac ROS-middleware voor implementatie en Jetson Thor voor uitvoering op de robot zelf.
Daarmee positioneert NVIDIA de robot niet als een gesloten product, maar als een ontwikkelstraat. Onderzoekers kunnen data verzamelen, gedrag trainen in simulatie, algoritmes testen en die vervolgens naar fysieke robots brengen. Teams behouden volgens NVIDIA controle over robotdata, trainingsdata, telemetrie en logs.
Universiteiten krijgen een gedeeld speelveld
Onderzoeksinstellingen zoals Ai2, ETH Zurich, Stanford Robotics Center en UC San Diego’s Advanced Robotics and Controls Laboratory zullen de referentierobot gebruiken voor geavanceerd humanoïde onderzoek. Ook NVIDIA Research zal het ontwerp inzetten om Isaac GR00T-modellen, frameworks en hardware verder te ontwikkelen.
Dat maakt de aankondiging strategisch interessant. In plaats van dat elke onderzoeksgroep zijn eigen robotbasis moet bouwen, ontstaat er een gedeeld referentieplatform. Dat kan vergelijkingen tussen algoritmes, datasets en robotgedrag eenvoudiger maken. Voor de roboticasector is dat mogelijk een versneller: minder tijd verliezen aan integratie, meer tijd winnen voor echte doorbraken.
Waarom dit meer is dan een robotdemo
Humanoïde robots zijn al jaren het spektakelstuk van technologiebeurzen. Ze lopen over podia, tillen dozen op of zwaaien naar het publiek. Maar NVIDIA probeert met Isaac GR00T iets anders te doen: de infrastructuur leveren waarmee die demonstraties kunnen uitgroeien tot herhaalbare, schaalbare en onderzoekbare systemen.
Jensen Huang, CEO van NVIDIA, noemt humanoïde robots een sleutel tot fysieke AI in de grootste industrieën ter wereld en spreekt over een economische kans van meerdere biljoenen dollars. Dat blijft een ambitieuze vooruitblik, maar de richting is duidelijk: NVIDIA wil voor robots worden wat het al is voor AI-datacenters, de reken- en softwaremotor achter een nieuwe generatie toepassingen.
Beschikbaarheid
De NVIDIA Isaac GR00T Reference Humanoid Robot wordt volgens NVIDIA eind 2026 beschikbaar via Unitree. Daarnaast wordt een Isaac GR00T-referentieworkflow voor de Unitree G1 binnenkort verwacht op GitHub en Hugging Face.
Conclusie: De robot krijgt een open handleiding
Met Isaac GR00T probeert NVIDIA de humanoïde robot minder mysterieus en meer reproduceerbaar te maken. Niet als sciencefictionfiguur, maar als onderzoeksinstrument. De boodschap is duidelijk: de volgende grote stap in AI speelt zich niet alleen af in chatvensters of datacenters, maar ook in lichamen die leren bewegen, grijpen en werken in de echte wereld.
Of humanoïde robots binnenkort massaal in fabrieken, magazijnen of zorgomgevingen verschijnen, blijft onzeker. Maar met een open referentieontwerp zet NVIDIA alvast een stevige stap richting een toekomst waarin robotica minder versnipperd en veel toegankelijker wordt voor onderzoekers.
|
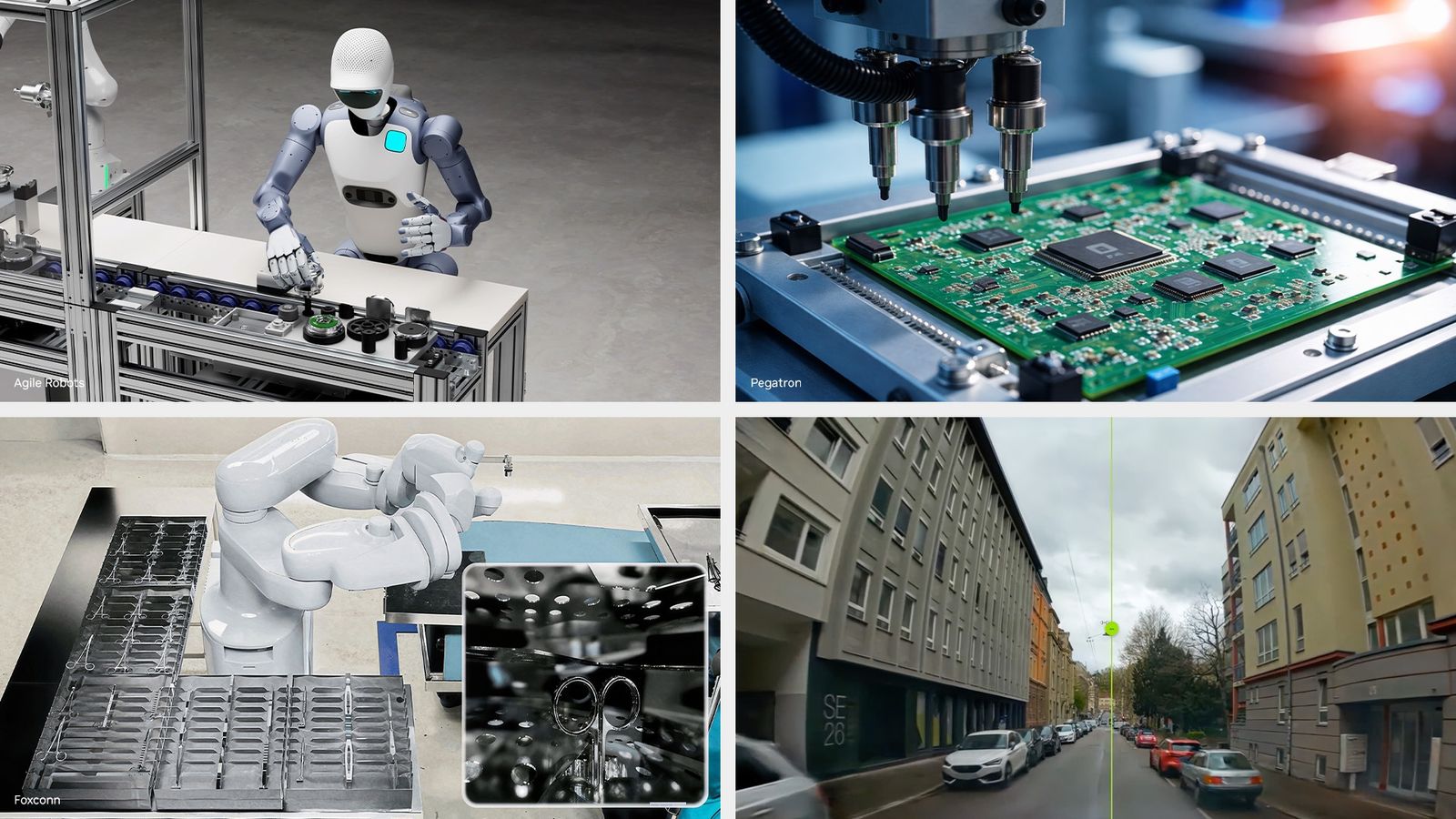
NVIDIA Releases Major Collection of Open Source Agent Tools and Skills for Physical AINVIDIA today announced a major collection of open source physical AI skills and tools that help developers turn complex robotics, autonomous vehicle (AV), vision AI and industrial digital twin workflows into agent-executable tasks — reducing the costs, time and complexity of building physical AI workflows at scale. |